Overview
The Mid.CBF Monitoring & Control System (MCS) provides a high-level interface to the Telescope Monitoring and Control (TMC) and CSP_Mid Local Monitoring and Control (LMC) systems, and translates the high-level commands into the configuration and control of Mid.CBF signal processing FPGAs.
System Context
The following diagram shows MCS as it fits into the rest of the CSP Mid system.
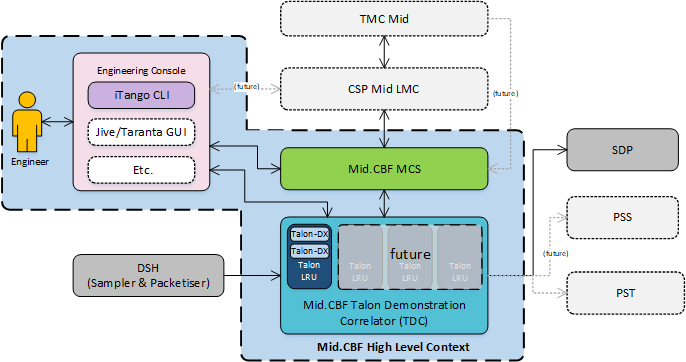
MCS System Context
TMC and CSP_Mid LMC interact with MCS through the CBF Controller and CBF Subarray devices, permitting monitoring, configuration and control of subordinate MCS devices and the low-level Mid.CBF devices on the FPGA Host Servers (FHS) of the FPGA LRUs. The diagram below shows these interactions, as well as the PyTest client which is used for CI/CD testing of the interfaces between TMC/CSP_Mid LMC and MCS.
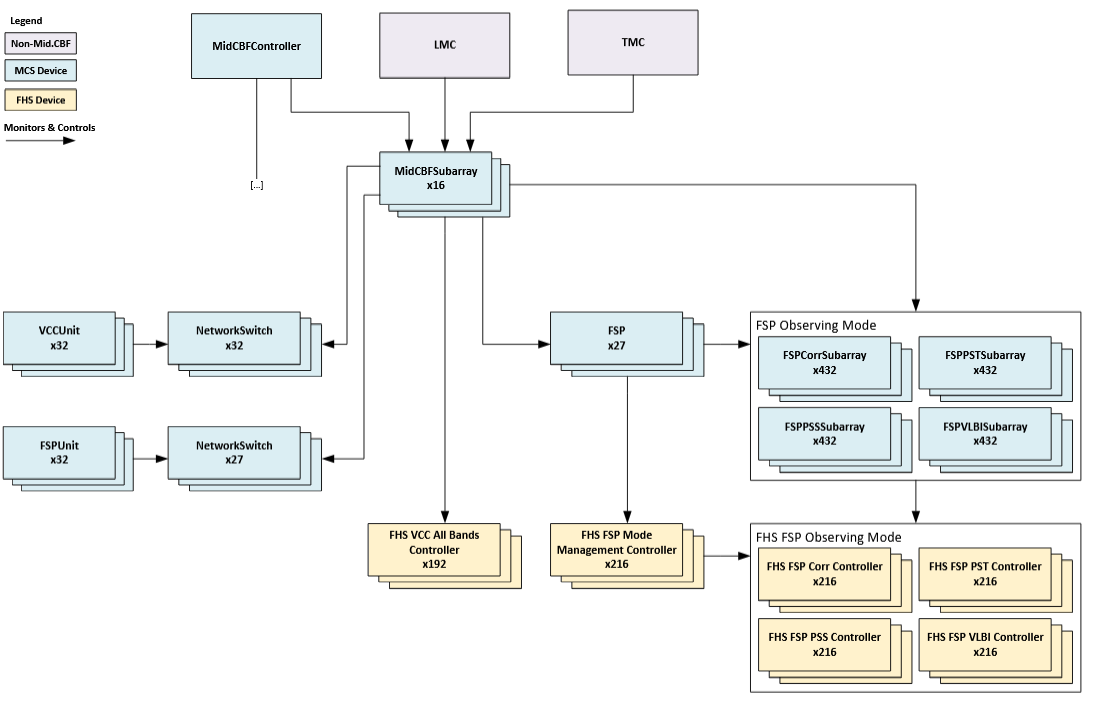
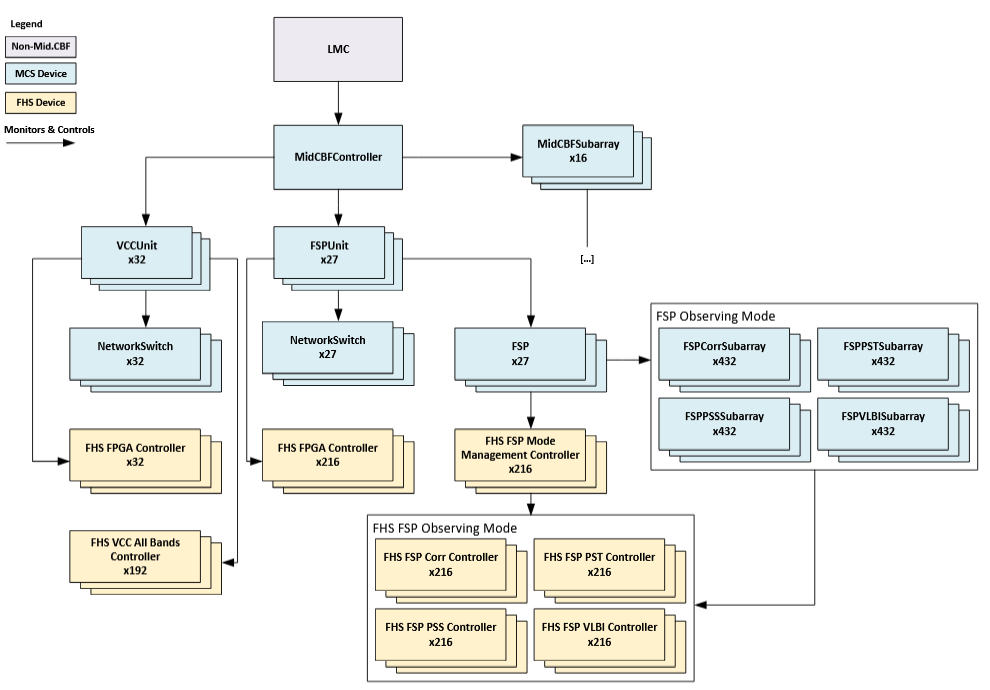
In MCS there is one VCC Unit device and one FSP Unit device for every physical VCC and FSP unit in the system. These devices monitor unit hardware and software health and functionality via the VCC all bands controller FHS devices for the VCC units, the FSP mode management and function mode controller FHS devices for the FSP units, and FPGA controller FHS devices and network switch hardware for both the VCC and FSP units.
MCS Monitoring & Control - Controller View
MCS Monitoring & Control - Subarray View