Tango Tile to TPM
Tango Tile Device Construction
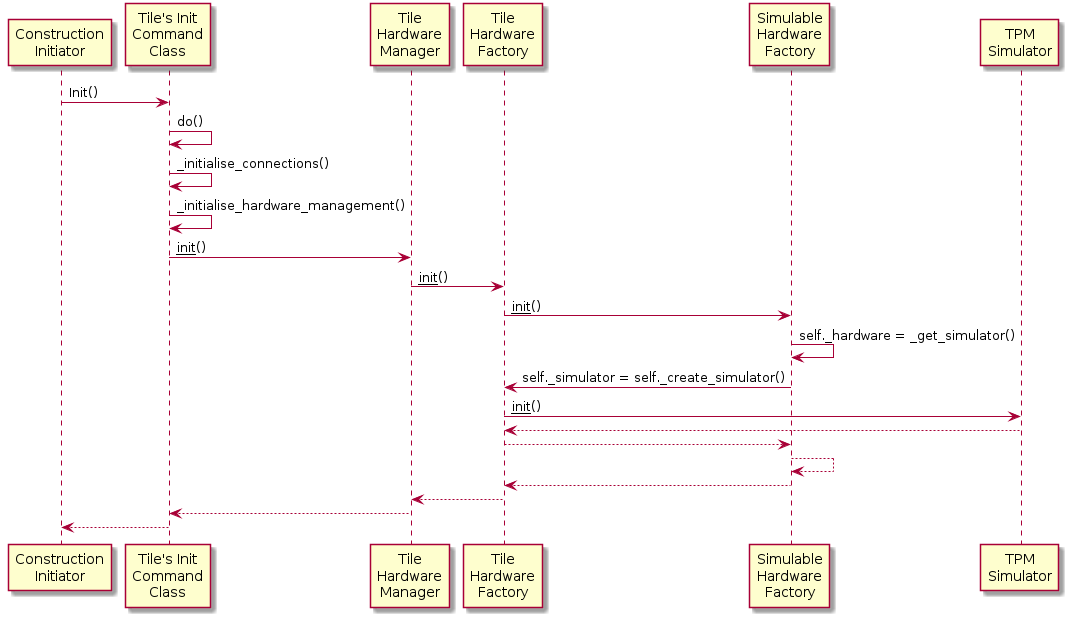
The TPM (or simulator) is created during the Tile’s Init command. This command is executed automatically during construction of the Tile Tango device. The decision whether to use the TPM simulator or a real hardware driver is made with the simulation_mode flag. This is currently hardcoded to SimulationMode.TRUE in tile_device.py. This means that either the TPM simulator or the real hardware driver is available as soon as the Tile Tango device is ready for use. You can swicth between simulation and real TPM driver by writing to the Tile device’s simulation_mode attribute. This will reset the Tile’s TPM object.
The Hardware tile object is actually a factory, which returns either a Tile12 or a Tile16 object, depending on the Tango property TpmVersion.
TPM Simulator Construction
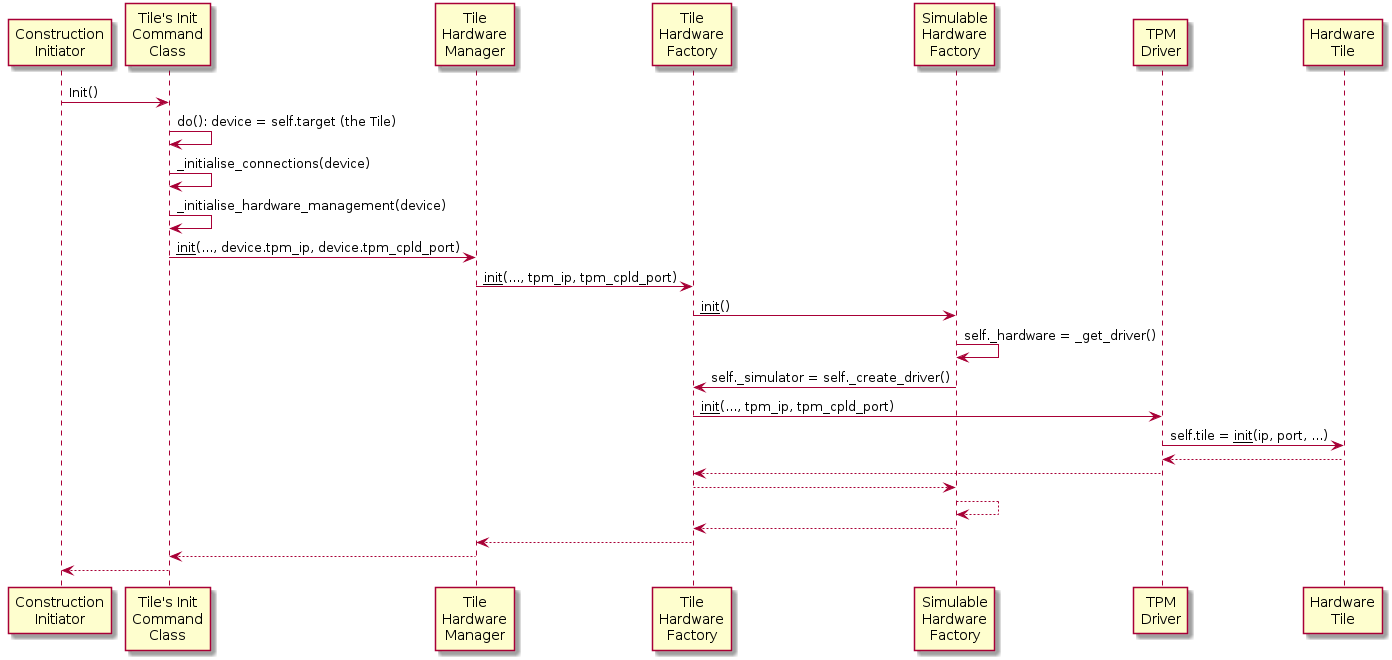
TPM Driver Construction
Connection to TPM & Firmware Download
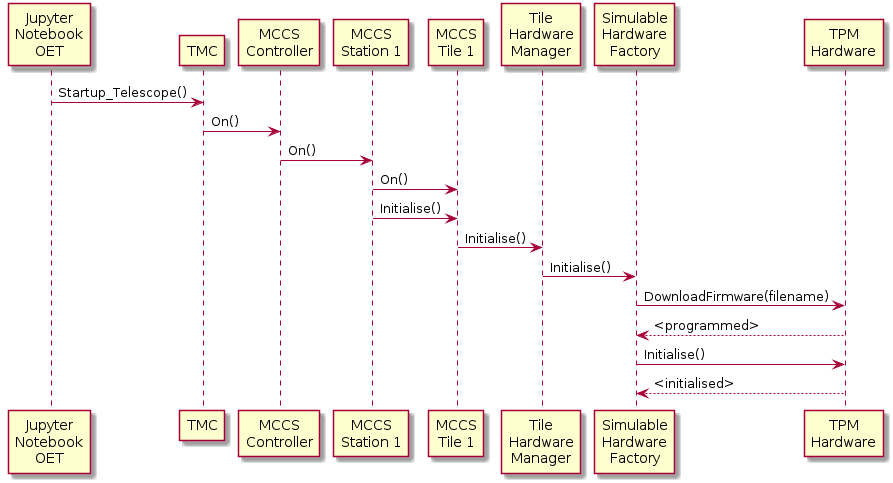
The firmware download is available via a command to the Tile Tango device. A path and name of a Vivado bit file are passed via the Tile’s ‘DownloadFirmware’ command to the TPM. The code checks that the file exists and then passes this file path down to the hardware (either real or simulated).
If no name is specified, the name defaults to “tpm_firmware_10.0.0.bit”.
Ursula’s Sequence Diagram
Gianni’s Code (Modified to hook into Ursula’s sequence)
Notes
Station devices holds Vivado firmware bitfile name. But filename can be a symlink with the standard name, pointing to the correct default filename, so it does not need to be propagated in most cases.
Tile devices hold specific information about the TPM’s IP address
Tile device holds information about TPM hardware version. This allows use of same software architecture as hardware is upgraded.
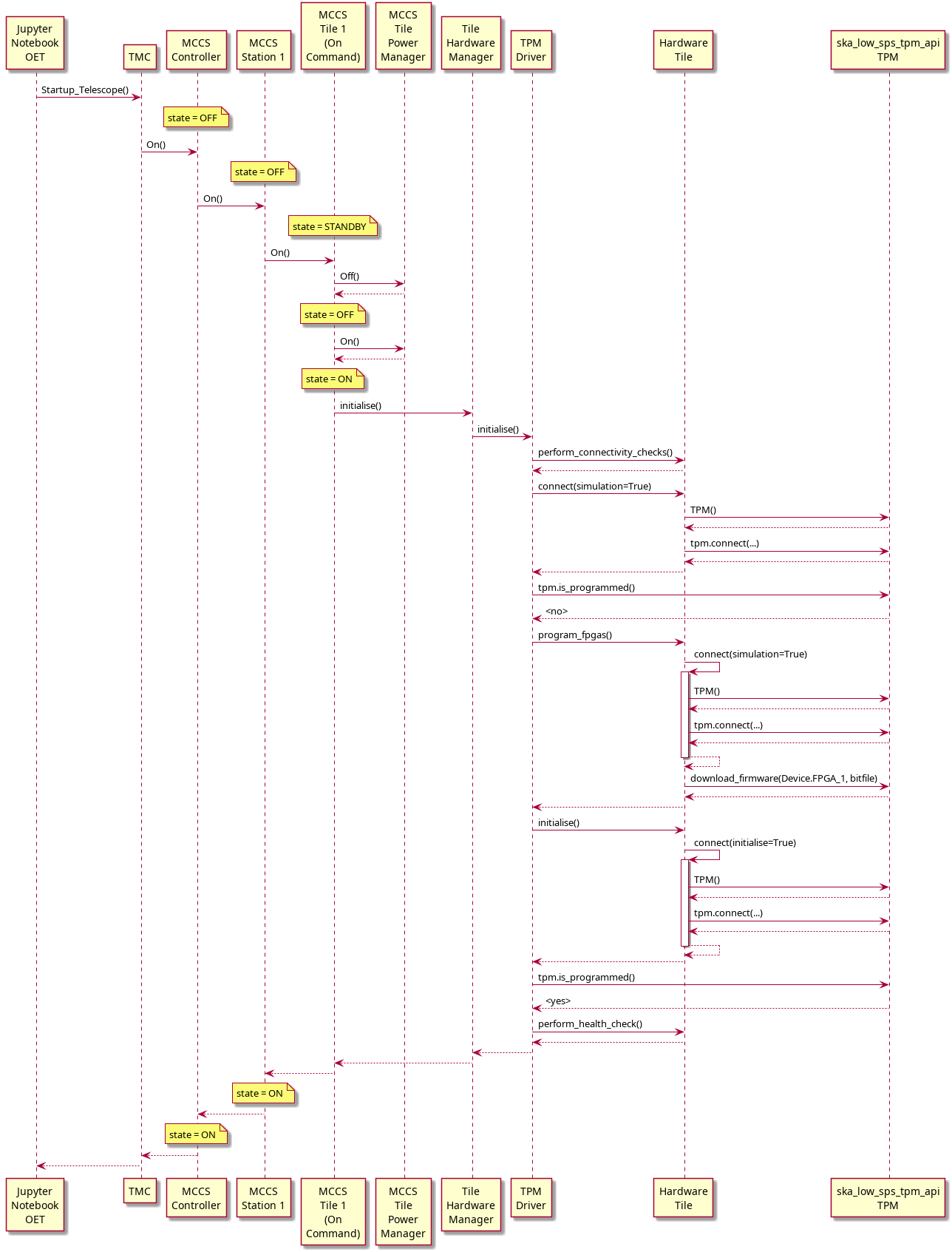
Programming occurs during STANDBY-> OFF transition. It can occur at any time usng command DownloadFirmware(). Call will be asynchronous as programming takes several seconds.
For the demo, a sleep() call is used.
A more clever solution would be to cycle from STANDBY to OFF and having the programming done in a separate thred. The thread will change the device state when the operation is completed
- TPM initialise is not currenty called. It would be called in the second option above
The commend also takes several (up to 10) seconds to complete.
After this sequence has finished, the Tile WebJive pages can be queried to return values read from the TPM hardware
Tile Power Management
The system is considered to be in a low power mode until the TPM firmware has been loaded and is running. The whole topic of power management is an evolving area with conversations being had between Gianni, Mark and Alan…It involves the subrack, network switches as well as the TPM itself. For feature SPO-943, we will need to determine the initial state with respect to power and power mode. These initial conditions are also being flushed out by Daniel Hayden. It’s likely the initial conditions will involve a manual setup to ensure the TPM is powered and in a state that the Tile Tango device can communicate with it.
Proposed mapping between status and power modes are:
Disabled: power mode OFF
Standby: Power mode ON, low power
OFF: Power mode ON, 80% full power, typ.
ON: Power 80-100%, depending on operation
This implies that the board is programmed and initialised when going from STANDBY to OFF. A default firmware name is coded in the device. The specific firmware name, if different, is provided before the STANDBY to OFF transition. Entering the STANDBY state deprograms the FPGAs.