CbfComponentManager Class
- class ska_mid_cbf_tdc_mcs.component.component_manager.CbfComponentManager(*args: Any, **kwargs: Any)[source]
Bases:
TaskExecutorComponentManagerA base component manager for SKA Mid.CBF MCS
This class exists to modify the interface of the
ska_tango_base.executor.executor_component_manager.TaskExecutorComponentManager. TheTaskExecutorComponentManageracceptsmax_queue_sizekeyword argument to determine limits on worker queue length, for the management of SubmittedSlowCommand (LRC) threads.Additionally, this provides optional arguments for attribute change event and HealthState updates, for a device to pass in its callbacks for push change events.
Finally, the
TaskExecutorComponentManagerinherits from BaseComponentManager, which accepts the keyword arguments communication_state_callback and component_state_callback, each with an analogous callback method in the SKABaseDevice (namely _communication_state_changed and _component_state_changed) used to drive the operational state (opState) model from the component manager.- start_communicating(current_admin_mode: AdminMode, admin_mode: AdminMode) None[source]
Establish communication with the component, then start monitoring.
- stop_communicating(current_admin_mode: AdminMode, admin_mode: AdminMode) None[source]
Stop communication with the component
- task_abort_event_is_set(command_name: str, task_callback: Callable, task_abort_event: Event) bool[source]
Helper method for checking task abort event during command thread.
- Parameters:
command_name – name of command for result message
task_callback – command tracker update_command_info callback
task_abort_event – task executor abort event
- Returns:
True if abort event is set, otherwise False
- create_group_proxies(group_proxies: dict) bool[source]
Create group proxies (list of DeviceProxy) from the list of FQDNs passed in. Store as class attributes. :param :return: True if the group proxies are successfully created, False otherwise.
- issue_group_command(command_name: str, proxies: list[tango.DeviceProxy], max_workers: int, argin: any | None = None) list[any][source]
Helper function to perform tango.Group-like threaded command issuance. Returns list of command results in the same order as the input proxies list. If any command causes a tango.DevFailed exception, the result code for that device’s return value will be ResultCode.FAILED.
Important note: all proxies provided must be of the same device type.
For fast commands, the return value will a list of ResultCode and message string tuples. For Long Running Commands, the return value will be a list of ResultCode and unique command ID tuples.
- Parameters:
command_name – name of command to be issued
proxies – list of device proxies in group; determines ordering of return values
argin – optional command argument, defaults to None
max_workers – maximum number of PyTangoThreadPoolExecutor workers
- Returns:
list of proxy command returns
- update_device_health_state(health_state: HealthState) None[source]
Handle a health state change. This is a helper method for use by subclasses.
- Parameters:
health_state – the new health state of the component manager.
- results_callback(event_data: tango.EventData | None) None[source]
Callback for LRC command result events. All subdevices that may block our LRC thread with their own LRC execution have their longRunningCommandResult attribute subscribed to with this method as the change event callback.
- Parameters:
event_data – Tango attribute change event data
- op_state_callback(event_data: tango.EventData | None) None[source]
Callback for state attribute events.
- Parameters:
event_data – Tango attribute change event data
- wait_for_blocking_results(task_abort_event: Event | None = None, partial_success: bool = False, lrc_timeout: int | None = None) TaskStatus[source]
Wait for the number of anticipated results to be pushed by subordinate devices.
When issuing an LRC (or multiple) on subordinate devices from an LRC thread, command result events will be stored in self._results_queue; use this method to wait for all blocking command ID longRunningCommandResult events.
All subdevices that may block our LRC thread with their own LRC execution have the results_callback method above provided as the change event callback for their longRunningCommandResult attribute subscription, which will store command IDs and results as change events are received.
- Parameters:
task_abort_event – Check for abort, defaults to None
partial_success – set to True if we only need at least 1 of the blocking LRCs to be successful; defaults to False, in which case all LRCs must succeed
lrc_timeout – timeout in seconds. Use device default value if not provided.
- Returns:
TaskStatus.COMPLETED if status reached, TaskStatus.FAILED if timed out TaskStatus.ABORTED if aborted
- wait_for_blocking_states(target_state: tango.DevState, task_abort_event: Event | None = None) bool[source]
Wait for the number of anticipated state changes to be pushed by subordinate devices.
- Parameters:
target_state – target state to wait for in all monitored op states
task_abort_event – Check for abort, defaults to None
- Returns:
True if all state changes were successfully recorded, otherwise False
- attr_event_subscribe(proxy: tango.DeviceProxy, attr_name: str, callback: Callable, stateless: bool = True) None[source]
Subscribe to a given proxy’s attribute.
- Parameters:
proxy – DeviceProxy
attr_name – name of attribute for change event subscription
callback – change event callback
stateless – If False, an exception will be thrown if the event subscription encounters a problem; if True, the event subscription will always succeed, even if the corresponding device server is not running
- unsubscribe_all_events(proxy: tango.DeviceProxy) None[source]
Unsubscribe from a proxy’s longRunningCommandResult attribute.
- Parameters:
proxy – DeviceProxy
- property is_communicating: bool
Return whether communication with the component is established.
SKA Mid.CBF MCS uses the more expressive
communication_statusfor this, but this is still needed as a base classes hook.- Returns:
True if communication with the component is established, else False.
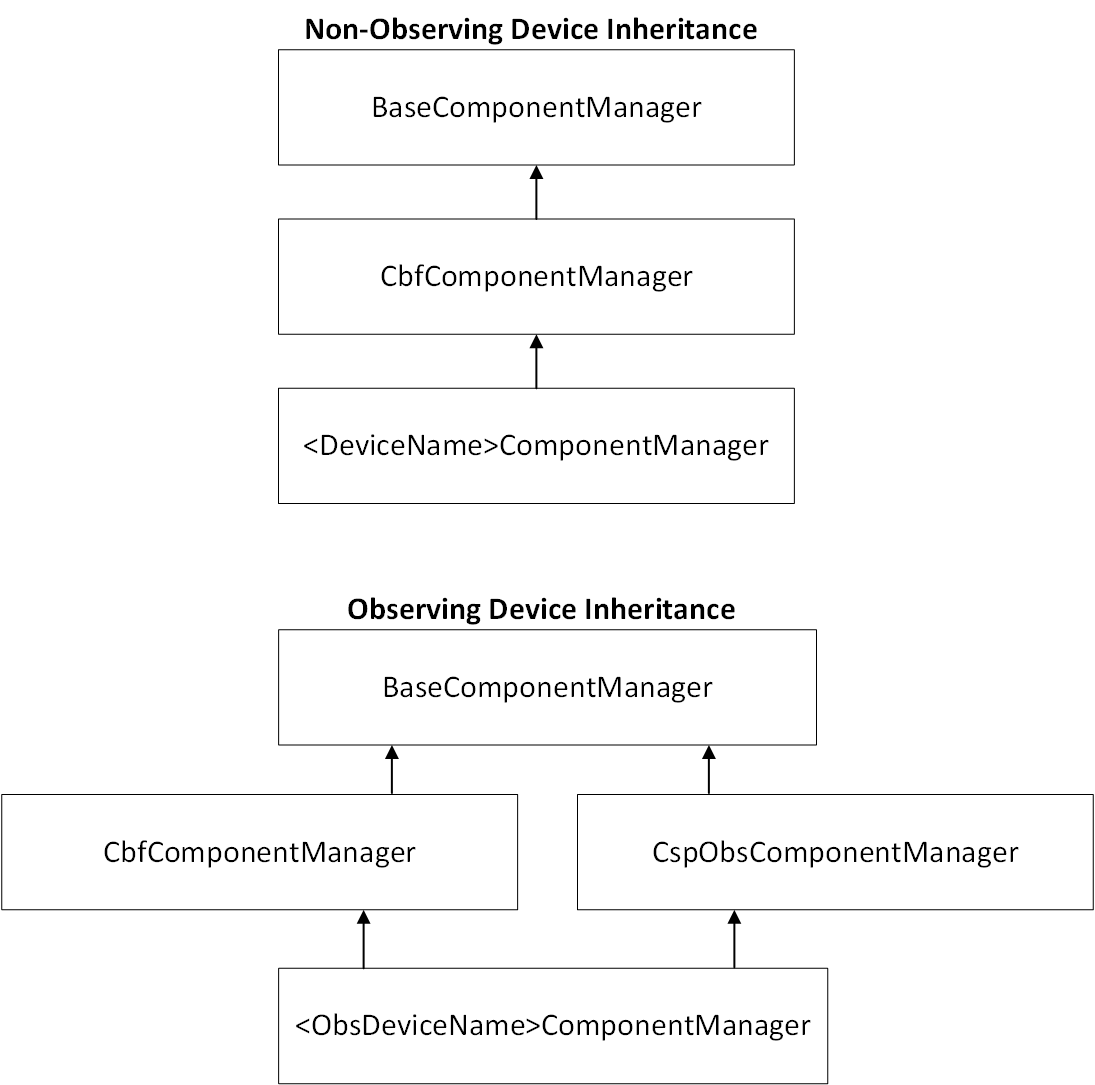
The MCS contains two types of Tango devices: observing and non-observing.
Non-observing devices contain only an op_state_model while observing devices
contain both an op_state_model and obs_state_model. As shown in the inheritance
diagram below, non-observing devices inherit from CbfComponentManager while observing
devices inherit from CbfComponentManager and CspObsComponentManager.