State Machine¶
The state machine module implements three fundamental SKA state machines:
the admin mode state machine
the operational state (opState, represented in TANGO devices by TANGO state) state machine
the observation state machine.
Admin mode state machine¶
The admin mode state machine allows for transitions between the five administrative modes:
NOT_FITTED: this is the lowest state of readiness, representing devices that cannot be deployed without some external action, such as plugging hardware in or updating network settings.)
RESERVED: the device is fitted but redundant to other devices. It is ready to take over should other devices fail.
OFFLINE: the device has been declared by SKA operations not currently to be used for operations (or whatever other function it provides)
MAINTENANCE: the device cannot be used for science purposes but can be operationed for engineering / maintenance purposes, such as testing, debugging, etc
ONLINE: the device can be used for science purposes.
The admin mode state machine allows for
any transition between the modes NOT_FITTED, RESERVED and OFFLINE (e.g. an unfitted device being fitted as a redundant or non-redundant device, a redundant device taking over when another device fails, etc)
any transition between the modes OFFLINE, MAINTENANCE and ONLINE (e.g. an online device being taken offline or put into maintenance mode to diagnose a fault, a faulty device moving between maintenance and offline mode as it undergoes sporadic periods of diagnosis.
Diagrams of the admin mode state machine are shown below.
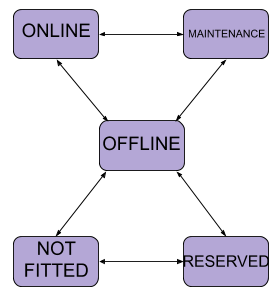
Diagram of the admin mode state machine, as designed¶
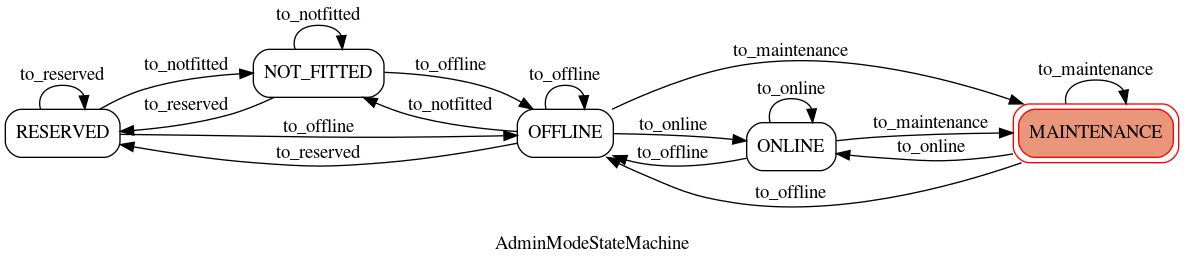
Diagram of the admin mode state machine, automatically generated from the implementation. The equivalence of this diagram to the diagram above demonstrates that the machine has been implemented as designed.¶
Operational state machine¶
The operational state (opState) machine represents the operational state of a SKA device. It is represented in TANGO devices using the TANGO “state”, so the states used are a subset of the TANGO states: INIT, FAULT, DISABLE, STANDBY, OFF and ON.
INIT: the device is currently initialising
FAULT: the device has experienced an error from which it could not recover.
DISABLE: the device is in its lowest state of readiness, from which it may take some time to become fully operational. For example, if the device manages hardware, that hardware may be switched off.
STANDBY: the device is unready, but can be made ready quickly. For example, if the device manages hardware, that hardware may be in a low-power standby mode.
OFF: the device is fully operational but is not currently in use
ON: the device is in use
The operational state state machine allows for:
transition from INIT or FAULT into any of the three “readiness states” DISABLE, STANDBY and OFF.
all transitions between these three “readiness states” DISABLE, STANDBY and OFF.
transition between OFF and ON.
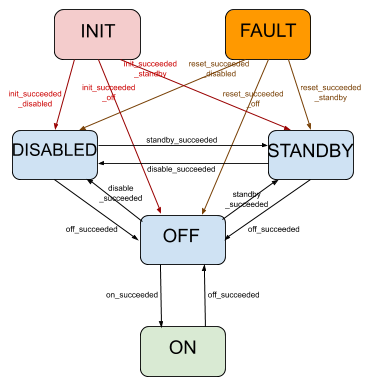
Diagram of the operational state (opState) state machine, as designed, ignoring coupling with admin mode¶
Unfortunately, operational state is inextricably coupled with admin mode: there are admin modes that imply disablement, and operational states such as ON should not be possible in such admin modes.
To facilitate this, the entire operational state state machine is accessible only when the admin mode is ONLINE or MAINTENANCE. When in any other admin mode, the only permitted operational states are INIT, FAULT and DISABLE. This constraint is implemented into the operational state state machine by
three extra states: INIT_ADMIN, FAULT_ADMIN and DISABLED_ADMIN
two extra transition triggers: “admin_on” and “admin_off”, which allow for transition between INIT and INIT_ADMIN; FAULT and FAULT_ADMIN; and DISABLE and DISABLE_ADMIN.
This implementation minimises the coupling between admin mode and operational state, allowing the two machines to be conceptualised almost separately.
Diagrams of the operational state state machine are shown below.
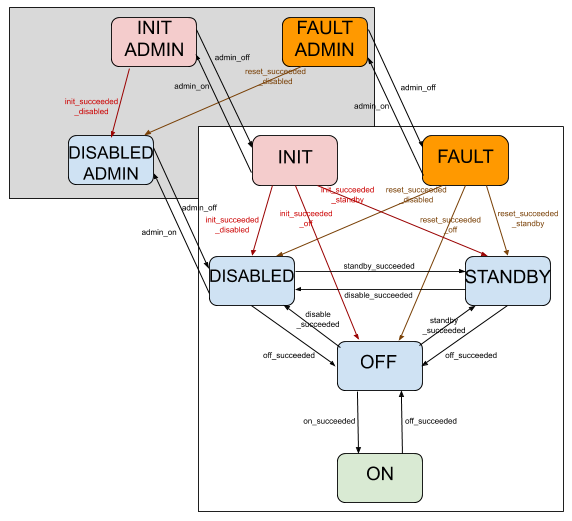
Diagram of the operational state (opState) state machine, as designed, showing coupling with admin mode¶

Diagram of the operational state state machine, automatically generated from the implementation. The equivalence of this diagram to the diagram above demonstrates that the machine has been implemented as designed.¶
Observation state machine¶
The observation state machine is implemented by devices that manage observations (currently only subarray devices).
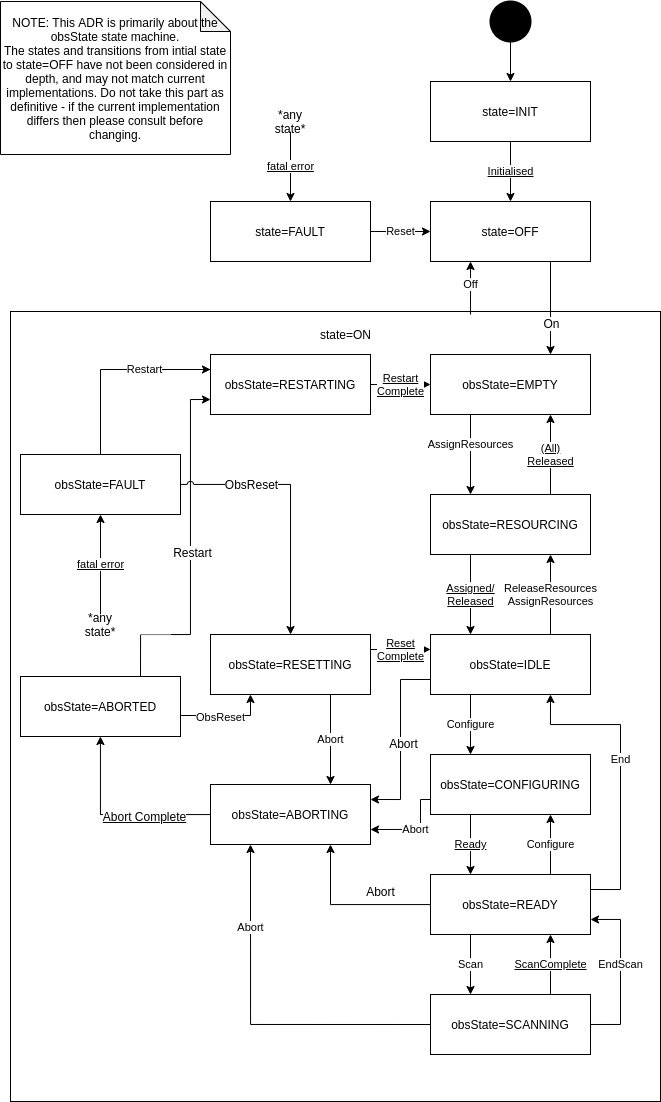
Diagram of the observation state machine, as decided and published in ADR-8.¶

Diagram of the observation state machine, automatically generated from the implementation. The equivalance of this diagram to the diagram previous demonstrates that the machine has been implemented in conformance with ADR-8.¶
CSP SubElement ObsDevice state machine¶
This state machine is implemented for the CSP SubElement devices, different from the subarrays, that manage observations.
Compared to the SKA Observation State Machine, it implements a smaller number of states, number that can be further descreased depending on the necessities of the different sub-elements.
The implemented states for the current state machine are:
IDLE: this is the observing state after the device intialization.
CONFIGURING: transitional state to report the device configuration is in progress. Need to understand if this state is really required by the observing devices of any CSP sub-element.
READY: the device is configured and is ready to perform observations
SCANNING: the device is performing the observation.
ABORTING: the device is processing an abort. Need to understand if this state is really required by the observing devices of any CSP sub-element.
ABORTED: the device has completed the abort request.
FAULT: the device has experienced an error from which it can be recovered only via manual intervention invoking a reset command that force the device to the base state (IDLE).

Diagram of the CSP SubElement observation state machine, automatically generated from the implementation.¶
API¶
This module contains specifications of SKA state machines.
-
class
ska_tango_base.state_machine.OperationStateMachine(*args: Any, **kwargs: Any)[source]¶ State machine for operational state (“opState”).
The states supported are “UNINITIALISED”, “INIT”, “FAULT”, “DISABLE”, “STANDBY”, “OFF” and “ON”.
The states “INIT”, “FAULT” and “DISABLE” also have “INIT_ADMIN”, “FAULT_ADMIN” and “DISABLE_ADMIN” flavours to represent these states in situations where the device being modelled has been administratively disabled.
Initialises the state model.
- Parameters
callback (callable) – A callback to be called when a transition implies a change to op state
extra_kwargs – Additional keywords arguments to pass to super class initialiser (useful for graphing)
-
class
ska_tango_base.state_machine.AdminModeStateMachine(*args: Any, **kwargs: Any)[source]¶ The state machine governing admin modes
Initialises the admin mode state machine model.
- Parameters
callback (callable) – A callback to be called whenever there is a transition to a new admin mode value
extra_kwargs – Additional keywords arguments to pass to super class initialiser (useful for graphing)
-
class
ska_tango_base.state_machine.ObservationStateMachine(*args: Any, **kwargs: Any)[source]¶ The observation state machine used by an observing subarray, per ADR-8.
Initialises the model.
- Parameters
callback (callable) – A callback to be called when the state changes
extra_kwargs – Additional keywords arguments to pass to super class initialiser (useful for graphing)
This module contains specifications of the CSP SubElement Observing state machine.
-
class
ska_tango_base.csp_subelement_state_machine.CspSubElementObsDeviceStateMachine(*args: Any, **kwargs: Any)[source]¶ The observation state machine used by a generic CSP Sub-element ObsDevice (derived from SKAObsDevice).
Initialises the model.
- Parameters
callback (callable) – A callback to be called when the state changes
extra_kwargs – Additional keywords arguments to pass to super class initialiser (useful for graphing)